Arctic Region Supercomputing Center
University of Alaska
Fairbanks, AK 99775-6020
This paper focuses primarily on the design, implementation, and performance issues involved in the creation of a parallel volume rendering engine on the Cray T3D. The programming model of choice is examined in the context of rendering medical data, and the computational workload and data distributions are described. Finally, an analysis of the computational performance achieved by the rendering engine using the Cray T3D is presented.
Techniques for visualizing volume data abound. Data reduction algorithms include marching cubes [8], which construct a limited representation of volume data based on graphics primitives such as polygons or triangular meshes. Models created with this approach can be manipulated interactively with the assistance of specialized hardware, but lack detail and much of the information present in the original data set is lost. At the opposite end of the spectrum, direct volume rendering algorithms such as ray casting [7] and splatting [15] create projections directly from the volume data. Currently, there is no generally available hardware to assist in the rendering, so full resolution direct volume rendering on workstations is considered non-interactive. We denote techniques such as those found in [6, 16, 17] as lossy interactive since each image generated is not completely accurate or uses precision-limiting hardware for compositing.
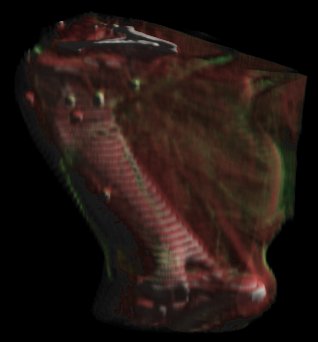
Images created with direct volume rendering typically contain a high percentage of the information stored in the original volume, but require an exceptional amount of computational resources. For example, the projection of a 256x256x50 volume data set onto a 300x300 pixel raster using the ray casting approach requires 20-30 seconds and up to 24MB of RAM on a 150MHz R4400 based Silicon Graphics workstation. Figure 1 shows the rear femur of a dog leg rendered with the ray casting approach. The same data set rendered using the splatting approach requires 2-10 seconds and has the advantage of only needing 3 data slices in memory at once, but all slices must be read from the disk to render an image.
Clearly, a volume rendering engine built around a data reduction strategy will not provide doctors, students, and research scientists with a suitable alternative to vivisection. Alternatively, a direct volume rendering engine capable of delivering performance on a level required for interactivity is one or two orders of magnitude beyond the capacity of single processor machines. In addition, the resolution of CT and MRI scanners is improving and every doubling of the resolution results in an eight-fold increase in the amount of memory and processing required. The increasing availability of parallel computers which incorporate hundreds and thousands of processors provide a viable solution. In addition to the additional processing power, they also provide the opportunity to spread the memory requirements across many processors.
Parallel ray casting algorithms have already been developed for the nCUBE [9], the Stanford DASH [11], and the Connection Machine [12]. Parallel splatting algorithms have been developed for the nCUBE 2 [4], and the Pixel-Planes 5 [10]. More general direct volume rendering algorithms have been developed for the Cray Y-MP [13] and the MasPar MP-1 [14]. In this paper, we investigate the ray casting and splatting algorithms on the Cray T3D.
High level language compilers for parallel systems are relatively new and unsophisticated. They are not yet adept at hiding many of the major issues which are peculiar to parallel programming. Consequently, the programmer must take into consideration such factors as the distribution of the data which yields a balanced workload and a minimal amount of communication, as inter-processor communication is typically the bottleneck in a parallel system. The raw data slices can be discarded prior to entering the second stage of the rendering process, so distributions of the data need only consider the shaded slices and the raster.
Consider the distribution of the volume along the z axis as shown in Figure 2. A contiguous subset of the shaded slices can be rendered independently of the rest of the volume. This is simply the rendering problem applied to a smaller volume. Ignoring contention for disk resources (which depends entirely on the configuration of the hardware) and assuming the size of the volume (in slices) is not significantly greater than the number of processors (e.g. the number of slices per processor remains constant), the rendering phase can be accomplished in constant time. Assume that we have to render n slices, numbered from 1 to n, on p processors. In consideration of balancing the rendering workload, if n is not evenly divisible by p, then m = floor(n/p) + 1 slices are distributed to the first n - p floor(n/p) processors, and m = floor(n/p) slices to the remaining processors.
Furthermore, distributing the raw slices in a contiguous manner yields an equally efficient distribution of the shading workload. Shading slice z requires that slices z-1 and z+1 be examined. ("Slice" 0 and n+1 are approximated by slice 1 and n respectively.) Allocating slices z-1 through z+m+1 to a particular processor allows it to produce shaded slices z through z+m. Consequently, a contiguous partition of raw slices can be shaded independently of the rest, with essentially no inter-processor communication. Again, assuming the number of raw slices is not substantially larger than the number of processors, this step can be accomplished in constant time. Once the shading process is complete, each PE is left with exactly the partition of the volume required for the rendering phase and the data need not be redistributed.
On completion of the rendering stage, each processing element is left with a full size raster which contains the color and opacity values contributed by the slices in its local partition of the volume. These "partial-color" rasters must be composited from front-to-back (or back-to-front) as defined by the compositing equation
c = c(0)A(0) + (1 - A(0))(c(1)A(1) + (1 - A(1))(c(2)A(2) ... c(p-1)A(p-1)))
where c is the final color for a pixel in the overall image, c(i) is the color for that pixel on processor i, A(i) is the opacity for that pixel on processor i. Despite this limitation, the rasters can be combined using a variety of methods. The choice of a specific method is guided primarily by the particular characteristics of the target rendering hardware.
The main concern in a message passing system is the possibility of deadlock. As the compositing stage is the obvious hotbed of communication in this design, deadlock may occur as the rasters are combined. However this possibility can be minimized by the periodic synchronization of the processing elements.
An additional concern is scalability. Though this issue is primarily decided by the architecture of the target hardware, some consideration needs to be given to this area of the software design. The shading and rendering stages scale easily by one of two approaches: by assigning additional slices to each processor or by fixing the number of slices per PE as the number of processors is increased. In the second approach, as the scale of the volume increases the number of processors and the number of consequent rasters is increased. For this reason, the importance of selecting a compositing method appropriate to the interconnect network of the target hardware is emphasized.
The primary memory of the T3D is physically distributed, but globally addressable. For this reason, the T3D conforms to the non-uniform memory access model (NUMA), and consequently remote memory accesses require more time than local memory accesses. The RAM is distributed by processor, and may be either 16 or 64MB in size.
The processing elements of the T3D are paired off into nodes. Each node contains one network switch with a peak transfer rate of 300MB in each of six directions (bidirectional in each dimension), some additional hardware for barrier and eureka synchronization, and a Block Transfer Unit (BTU) to facilitate the movement of large quantities of data.
Inter-node communication occurs via the T3D's high performance interconnect network. This network has a three dimensional toroidal topology, and employs dimension ordered routing to reduce bus contention and packet collisions. The bisection bandwidth of the network is approximately 75 gigabytes per second for a 1024 node configuration. Additionally, network latency is partially hidden through the use of a pre-fetch queue and the BTU.
At the present time, the Cray T3D requires a front-end host, typically a Cray Y-MP E, M90, or C90, to handle I/O requests. Future versions of the T3D will include direct data and I/O control paths.
The flexibility of this architecture is apparent by the software support Cray has provided for the SIMD, MIMD, and SPMD parallel programming models. Shared memory functionality is provided via a set of Fortran compiler directives (CRAFT) and via a collection of low-level routines for the direct transplantation of data between processors (shmem). Alternatively, message passing functionality is provided through a Cray-optimized version of the Parallel Virtual Machine (PVM) (footnote: PVM was originally developed in support of distributed heterogeneous computing, but has been adapted by Cray Research Inc. as a message passing solution for the T3D) package created by Oak Ridge National Laboratories.
The RAM capacity of the ARSC T3D is 16MB per PE. This T3D is currently operating under UNICOS MAX version 1.1.0.1 and requires approximately 3.9MB of the 16MB per PE. The completeness of our analysis is limited by the memory size of the ARSC T3D.
Both versions of VolRender follow the basic design outlined in previous sections of this paper, with minor differences. With respect to compositing the partially completed raster images, an inverted binary tree method (Figure 3) and a tiling method (Figure 4) were examined. The tiling approach is intuitively appropriate, as it keeps all processing elements working on the problem until the final image is completed. Note that during the first cycle, PE 0 composites tile 0 on PE 1 with its tile 0, while PE 1 composites tile 1 on PE 2 with its tile 1, and so on. This staggered approach eliminates memory contention. However at each of the n-1 cycles, n messages are sent across the network (each PE must receive one message). With this level of traffic, network contention becomes a severe concern. Conversely, the inverted tree approach requires that at most n/2 messages will occupy the network in any cycle, but during latter cycles a majority of the processing elements are idle. For 8 or fewer PEs, there is no discernible difference between the compositing times for the two approaches. As the number of PEs increases, the tiling approach is superior.
| 1 | 2.53 | 2.54 | 2.57 | 2.59 | 2.59 | 2.61 | 2.61 | 2.54 | |
| 2 | 2.85 | 2.87 | 2.88 | 2.89 | 2.90 | 2.87 | |||
| 3 | 3.14 | 3.16 | 3.17 | 3.19 | 3.18 | ||||
| 4 | 3.43 | 3.46 | 3.47 | 3.48 | 3.42 |
| 1 | 0.26 | 0.26 | 0.28 | 0.30 | 0.34 | 0.32 | 0.33 | 0.31 | |
| 2 | 0.49 | 0.51 | 0.53 | 0.60 | 0.55 | 0.49 | |||
| 3 | 0.69 | 0.71 | 0.81 | 0.66 | |||||
| 4 |
With respect to scaling the problem size, the rendering times clearly favor maintaining a constant 1:1 slice-to-PE ratio, while varying the number of processing elements. An intuitive expectation is that there should exist a point at which this ratio is no longer desirable. Such a situation may exist when the number of PEs is increased to the point that the time required for a message to travel the distance of the diameter of the network becomes a significant factor. However this number seems to be well beyond the current 128 PE capacity of the ARSC's T3D. The practical limitation this capacity imposes will require (for data sets > 128 slices) scaling the size of the problem by varying the slice-to-PE ratio. This results in a linear increase in the rendering times as the ratio is increased. Note that the rendering times presented in Table 1 and Table 2 include the time required to composite the rasters. Note also that the rendering times for a PE group size of 1, the communication time is zero as no data is transferred. Examining these tables with these considerations in mind, it is clear that the total time spent in communication between processors is a minor fraction of the total rendering time.
rtclock.
Further improvements are expected with parallel implementations
of algorithms such as that mentioned in [5].
An additional topic of current and future research involves the
development of an interface for these parallel rendering engines,
using the visualization package AVS.
The final product is expected to work with an X Windows based client
attached directly to the T3D via HIPPI, FDDI, or Ethernet.
An Ethernet option is provided to allow students and researchers
use of this tool from remote locations.
[2] Cray Research Incorporated, Minnesota. MPP Software Guide (SG-2508V), 1st edition, 1993.
[3] Cray Research Incorporated, Minnesota. PVM and HeNCE Programmer's Manual (SR-2500/SR-2501), 3rd edition, 1993.
[4] T. Todd Elvins. Volume Rendering on a Distributed Memory Parallel Computer. In Arie E. Kaufman and Gregory M. Nielson, editors, Visualization '92, pages 93-98, 1992.
[5] Philippe Lacroute and Marc Levoy. Fast volume rendering using a shear-warp factorization of the viewing transformation. In Andrew S. Glassner, editor, Computer Graphics (SIGGRAPH '94 Proceedings), pages 451-458, 1994.
[6] David Laur and Pat Hanrahan. Hierarchical Splatting: A Progressive Refinement Algorithm for Volume Rendering. In Thomas W. Sederberg, editor, Computer Graphics (SIGGRAPH '91 Proceedings), volume 25, pages 285-288, July 1991.
[7] Marc Levoy. Display of Surfaces From Volume Data. IEEE Computer Graphics and Applications, 8(3):29-37, May 1988.
[8] William E. Lorensen and Harvey E. Cline. Marching Cubes: A High Resolution 3D Surface Construction Algorithm. In Maureen C. Stone, editor, Computer Graphics (SIGGRAPH '87 Proceedings), volume 21, pages 163-169, July 1987.
[9] C. Montani, R. Perego and R. Scopigno. Parallel Volume Visualization on a Hypercube Architecture. 1992 Workshop on Volume Visualization, pages 9-16, 1992.
[10] Ulrich Neumann. Interactive volume rendering on a multicomputer. In David Zeltzer, editor, Computer Graphics (1992 Symposium on Interactive 3D Graphics), volume 25, pages 87-93, March 1992.
[11] Jason Nieh and Marc Levoy. Volume Rendering on Scalable Shared-Memory MIMD Architectures. 1992 Workshop on Volume Visualization, pages 17-24, 1992.
[12] Peter Schroeder and James B. Salem. Fast Rotation of Volume Data on Parallel Architectures. Visualization '91, pages 50-57, 1991.
[13] Don Stredney, Roni Yagel, Stephen F. May, and Michael Torello. Supercomputer Assisted Brain Visualization with an Extended Ray Tracer. 1992 Workshop on Volume Visualization, pages 33-38, 1992.
[14] Guy Vezina, Peter A. Fletcher, and Philip K. Robertson. Volume Rendering on the Maspar MP-1. 1992 Workshop on Volume Visualization, pages 3-8, 1992.
[15] Lee Westover. Footprint evaluation for volume rendering. In Forest Baskett, editor, Computer Graphics (SIGGRAPH '90 Proceedings), volume 24, pages 367-376, August 1990.
[16] Jane Wilhelms and Allen Van Gelder. A Coherent Projection Approach for Direct Volume Rendering. In Thomas W. Sederberg, editor, Computer Graphics (SIGGRAPH '91 Proceedings), pages 275-283, 1991.
[17] Peter L. Williams. Interactive Splatting of Nonrectilinear Volumes. In Arie E. Kaufman and Gregory M. Nielson, editors, Visualization '92, pages 37-44, 1992.