Pipelining, Dependencies, and Operand Forwarding
Back in the 1980's, microprocessors took many clock cycles per instruction, usually at least four clock cycles. They even printed up tables of clock cycle counts for various instructions and modes, to help you optimize your code. This ancient situation still exists with many embedded processors, like the PIC microcontroller. But this began to change with the Intel 486, which used "pipelining" to cut the number of clock cycles per instruction (CPI).
The idea behind pipelining is for the CPU to schedule its various components the same way a sane human would use a washer and dryer. For the sake of argument, assume you've got:
- Five loads of laundry A B C D E
- They all need to be washed, dried, and folded
- Load E's already clean, and just needs to be dried and folded.
- Each load takes an hour to wash, dry, or fold
So the steps needed are as follows:
Wash A
Dry A
Fold A
Wash B
Dry B
...
Fold D
// don't need to wash E
Dry E
Fold E
Here's how a 286 would execute this program:
| Hour |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
| Washer |
A |
|
|
B |
|
|
C |
|
|
D |
|
|
|
|
| Dryer |
|
A |
|
|
B |
|
|
C |
|
|
D |
|
E |
|
| Fold |
|
|
A |
|
|
B |
|
|
C |
|
|
D |
|
E |
It's an all-day job, which is clearly stupid, because only one thing is happening at once.
The sensible thing is to make a "pipeline", like an assembly line, where you start washing load B as soon as you move load A over to the dryer. So here's how a 486 would do the same work:
| Hour |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
| Washer |
A |
B |
C |
D |
|
|
|
| Dryer |
|
A |
B |
C |
D |
E |
|
| Fold |
|
|
A |
B |
C |
D |
E |
That is, you start washing load D at the same time as you start folding load B. This way, everything's busy, which speeds up the overall program substantially--about a factor of two in this case.
Notice how long it takes to dry C--it really takes an hour, but imagine you didn't need to do that (e.g., load C is waterproof rain gear). You can't start drying D, since it's still in the washer. You could start folding C immediately, but you're busy folding B. So if you leave out "dry C", the overall process is the *same speed*. This means "dry C" is basically free--zero clock cycles!
Back in the 1990's, I thought zero-clock instructions were really profound, in a zen kind of way.
Pipeline Stalls and Flushes
In a real CPU, the stages "wash", "dry", and "fold" might be "fetch instruction from memory (F)", "decode instruction (D)", "read registers needed for computation (R)", "compute values on registers" (execute phase, E), and finally "write result back to register file (W)" (instruction completion or "retirement").
F1 D1 R1 E1 W1 (instruction 1)
F2 D2 R2 E2 W2 (instruction 2)
F3 D3 R3 E3 W3 (instruction 3)
F4 D4 R4 E4 W4 (instruction 4)
F5 D5 R5 E5 W5 (instruction 5)
-> time ->
But consider what happens when you execute a slow instruction like divide--subsequent instructions might use the divided value. The CPU hence can't execute these instructions until their data is ready, and so the CPU must detect these dependencies (also called "pipeline interlocks") and insert waste "stall cycles" or ("pipeline bubbles") to wait for the needed data. Pipeline stalls can still cost performance today--see below for software tricks on minimising dependencies!
F1 D1 R1 E1 W1 (normal instruction)
F2 D2 R2 E2 E2 E2 E2 E2 E2 W2 (divide: 6 clock cycles)
F3 D3 R3 stall ........ E3 W3 (three stalled-out instructions)
F4 D4 stall ........ R4 E4 W4
F5 stall ........ D5 R5 E5 W5
F6 D6 R6 E6 W6 (continuing normally)
-> time ->
Smarter CPUs will only stall instructions that are waiting on that data, rather than stopping everything in progress like I've shown above.
Here's a MIPS example that takes an extra clock cycle due to the load into register 4 immediately being used by the next instruction, the add:
li $3, 5
lw $4, ($25)
add $2, $4, $3
jr $31
nop
(Try this in NetRun now!)
It's even worse with branch instructions--rather than just waiting, subsequent instructions, even though they're fetched and ready to go, might never have happened. So these instructions need to be "flushed" from the pipeline; and again, it's the CPU's control unit that needs to detect the situation and do the flushing (anybody starting to smell some complexity here?).
F1 D1 R1 E1 W1 (normal instructions)
F2 D2 R2 E2 Branch!
F3 D3 R3 flush (flushed instructions-that-never-were)
F4 D4 flush
F5 flush
F9 ... (starting over at the branch target)
-> time ->
MIPS branches are pretty good, in that they only take one additional clock cycle, and you can even specify the instruction to insert during that clock cycle, called the "branch delay slot" instruction.
li $4, 6
li $3, 5
beq $3,$3,end_of_world
add $2, $3, $4 # Always gets executed (branch delay slot)
# Stuff in here gets jumped over
nop
nop
nop
end_of_world:
jr $31
nop
(Try this in NetRun now!)
Pipelining with Operand Forwarding
Because it might take a few clock cycles to write and then read from the register file, and it's very common that an instruction needs the value computed by the immediately preceeding instruction, often real pipelined CPUs bypass the register file, and pass values directly from the execute stage of one instruction into the execute stage of the next:
F1 D1 R1 E1 W1 (instruction 1)
F2 D2 R2 E2 W2 (instruction 2)
-> time ->
Here E2 needs the result coming out of E1, so you can put in a special "forwarding" circuit to take it there. Note that if you don't do forwarding, you would need to insert two stall cycles to wait for the write and read from the register file:
F1 D1 R1 E1 W1 (instruction 1)
F2 D2 stall R2 E2 W2 (instruction 2)
-> time ->
As usual, the CPU control unit must detect the dependency, decide to use operand forwarding, and light up the appropriate CPU hardware to make it happen.
MIPS is officially an acronym for "Machine (without) Interlocking Pipeline Stages" (but it's probably also a bacronym for "Millions of Instructions Per Second), because the designers were really happy with themselves for building in operand forwarding. It does work, since we can measure that there are no stalls in this code, despite the back-to-back dependent "add" instructions:
li $4, 6
add $3, $4, $4
add $2, $3, $4
jr $31
nop
(Try this in NetRun now!)
Architecture-Level Pipelining Differences
Just staring at some diagrams can show you some of the differences brought by pipelining. Here's the Intel 8008, a non-pipelined CPU:
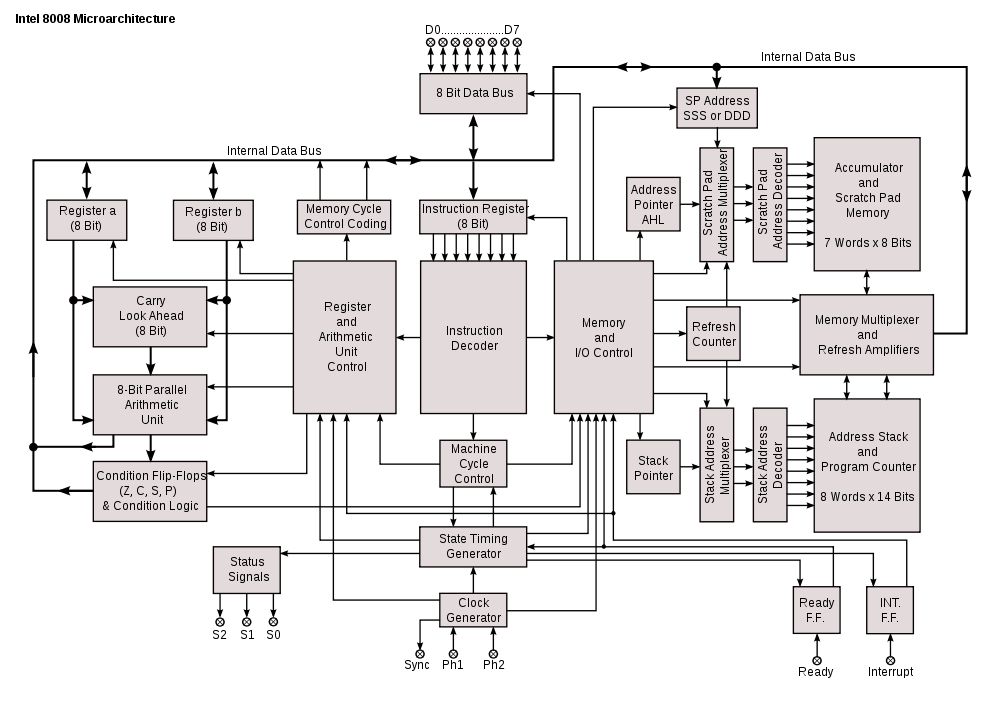
Note that there's just one bus running around the entire CPU, so there's no possible way that multiple operations could happen at once.
Compare this with the Intel 386, a pipelined CPU:

Note that now there are many separate busses, which allow instruction fetch to happen simultaneously with execution.
CS 441 Lecture Note, 2014, Dr. Orion Lawlor, UAF Computer Science Department.